
手術支援ロボットの最新機種「ダビンチSP」を
藤田医科大学病院が国内初導入
~3月8日、同機による第1例目手術を実施しました~
藤田医科大学病院(愛知県豊明市沓掛町田楽ヶ窪1番地98 病院長:白木良一)は、米国インテュイティブサージカル社の最新手術支援ロボット「ダビンチSPサージカルシステム(以下、ダビンチSP)」を国内で初めて導入し3月8日、同機による第1例目の手術(ダビンチ支援下幽門側胃切除術[胃がん])を無事終了したことをご報告いたします。
最少1カ所の切開創で低侵襲性と整容性を実現
 ダビンチSP〈製品画像:インテュイティブサージカル合同会社提供〉
ダビンチSP〈製品画像:インテュイティブサージカル合同会社提供〉
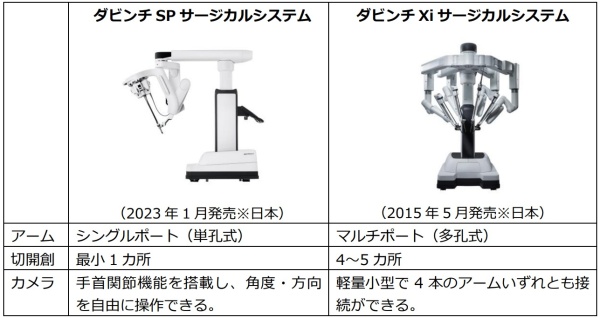
当院が今回導入したダビンチSPは、アクセスに制限のある術野にアプローチできるようロボットアームを1本にしたシングルポート(単孔式)で設計されているのが特徴です。既存のダビンチが複数のアームで構成するマルチポート(多孔式)なのに対し、ダビンチSPはアームが1本のため切開創も最少1カ所で済み、患者さんの体へのさらなる負担軽減や整容性の向上が期待できます。とくに、マルチポートでは難しかった体腔内の深く狭い術野で威力を発揮すると考えられます。
ダビンチSPの特徴
- 計1~3か所の切開創で手術を行えるため、術後の疼痛が軽減し、患者さんの体に優しい手術が提供可能
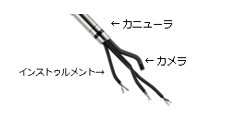
- ロボットアームに取り付けられた直径2.5cmのカニューラと呼ばれる筒から、カメラ(内視鏡)と3本のインストゥルメント(専用鉗子)を体腔内に挿入して手術を行います
- ロボットアームは360度回転可能
- カメラは、ダビンチサージカルシステム初となる2関節を有するフレキシブルに近い軟性鏡で、角度・方向を自由に操作できます。術野画像も3DHDで鮮明
- カニューラから体内に挿入されるインストゥルメントは、狭い術野内でもインストゥルメント同士が干渉しないよう多方向に柔軟に屈曲します
国内の医療機関で初のSP導入
特定機能病院として高度医療を提供する当院では、患者さんの体への負担が少ない内視鏡手術の利点を向上させるため、2008年、全国に先駆けて「ダビンチ」を導入。以降、5050件(2023年1月末時点)のダビンチ支援下内視鏡手術を行い、その実績は国内トップレベルを誇ります。
それらの実績を背景に、さらに低侵襲で合併症のリスクが少ない手術の実現に向け、今回、国内では初となるダビンチSPを導入。3月8日に先端ロボット・内視鏡手術学の宇山一朗教授(写真右)が執刀し、同機国内第1例目となる早期胃がんに対する幽門側胃切除術を施行しました。術後の患者さんの体調は非常に安定しています。
宇山教授はダビンチSPの操作性について、「アームが1本なので干渉し合うことがなく、カメラも手首関節機能で上から下からと幅広い視野が得られ画期的だと感じた。ダビンチSPと既設のダビンチXiはそれぞれに強みがあり、症例に合わせて使い分けることで、より精度が高く患者さんの体に優しい手術が可能になる。今後は症例を重ねて、患者さんに対する利点を検証していくとともに、若手外科医の指導に力を入れていきたい」と話しています。
今回の導入により、当院の手術支援ロボットの保有数は、オペ室にダビンチSP 1台、ダビンチXi 3台、メディカロイド社のhinotori 1台、学内のダビンチ低侵襲トレーニングセンターにダビンチXi 2台、ダビンチX 2台、同じく学内のメディカロイド インテリジェンス ラボラトリー 名古屋(MIL-Nagoya)にhinotori 1台となっています。また、今後のダビンチSPを用いた手術スケジュールは、3月13日に子宮全摘術2件を予定しています。
 〈製品画像:インテュイティブサージカル合同会社提供〉
〈製品画像:インテュイティブサージカル合同会社提供〉
ダビンチSPは従来のマルチポートシステムと同様、ペイシェントカート(写真右)、サージョンコンソール(同左)、ビジョンカート(同中)の3つのコンポーネントから成り、執刀医は患者さんと同じ手術室内のサージョンコンソールからロボットアームを操作して手術を行います。
ダビンチSPと既設のダビンチXi
 〈製品画像:インテュイティブサージカル合同会社提供〉
〈製品画像:インテュイティブサージカル合同会社提供〉
ダビンチSP
2022年9月22日付けの製造販売承認取得を経て、米国インテュイティブサージカルの日本法人、インテュイティブサージカル合同会社が同年1月31日に販売を開始。日本での展開は、米国、韓国に次いで3カ国目となります。当院への納入は同年2月25、26日に行われました。
適応領域
一般消化器外科、胸部外科(心臓外科ならびに肋間からのアプロ—チによる手術を除く)、泌尿器科、婦人科および頭頸部外科(経口的手術に限る)
-

左/3月8日に当院で行われた第1例目の手術の様子
右/執刀医は手術台から少し離れたサージョンコンソールに座り、遠隔でアームを操作します -
