
サージカルトレーニングセンター
手術支援ロボット「ダビンチ」
さまざまな術式に対し、今後も拡大へ
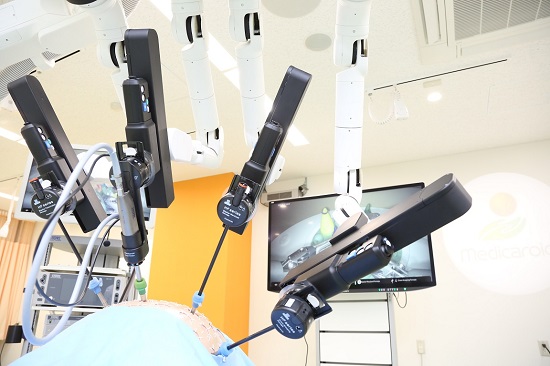
 ロボット支援手術の手術室 ペイシェントカートは中央、手術者コンソールは写真左奥
ロボット支援手術の手術室 ペイシェントカートは中央、手術者コンソールは写真左奥
「ダビンチ」は世界で最も普及している米国インテュイティブサージカル社の手術支援ロボットです。医師は手術台から少し離れたサージョンコンソールと呼ばれる操作ボックスに座って、モニターに映し出された3D画像を見ながら、手元のレバーや足元のペダルでアームを操作し、手術を行います。
◆藤田医科大学病院における「ダビンチ」導入機種(2025年10月)
・ダビンチXi 1台
・ダビンチSP 2台
・ダビンチ5 1台
ダビンチおよび対象疾患について詳しくはこちら
「ダビンチ」支援下による主な手術実績 ※2022年12月以降
- 2022年12月[ダビンチXi]を用いた国内初の膵全摘術を実施
- 2023年3月[ダビンチSP]を用いた第一例目の胃がん手術(幽門側胃切除術)を実施 ▶詳細はこちら
- 2024年4月[ダビンチSP]を用いた国内初の乳頭乳輪温存乳房摘出術を実施
- 2024年12月[ダビンチSP]を用いた世界初の小児外科手術(先天性胆道拡張症)を実施
- 2025年8月[ダビンチSP]を用いた国内初の膵頭十二指腸切除術を実施
国産手術支援ロボット「hinotori™ Surgical Robot System」
株式会社メディカロイドが開発した日本初の実用型手術支援ロボットです。手術器具や内視鏡を取り付けた4本のアームが特徴で、医師は患者さんの体から離れたサージョンコックピットで内視鏡の立体画像を確認しながら遠隔でアームを操作し、精緻な手術を行うことができます。2023年10月、本学から約5000㎞離れたシンガポール国立大学と手術支援ロボットhinotoriを用いた遠隔手術の実証実験を4日間にわたって実施しました。実証実験では、人との類似性が高いブタを用い、シンガポール国立大学に設置されたサージョンコックピット(操作台)から本学のhinotoriを操作し、幽門側胃切除・リンパ節郭清・残胃十二指腸吻合を行い、無事、成功しました。今後も遠隔手術の社会実装を推進してまいります。
 臓器モデルを用い、MIL名古屋のhinotoriをシンガポール国立大学から操作する須田教授(モニター内)
臓器モデルを用い、MIL名古屋のhinotoriをシンガポール国立大学から操作する須田教授(モニター内)
「hinotori」支援下による主な手術実績
- 2021年9月[hinotori]を用いた中部初の前立腺がん全摘除術を実施 ▶詳細はこちら
- 2022年11月[hinotori]を用いた世界初の胃がん切除術を実施 ▶詳細はこちら
- 2021年5月[hinotori] 藤田医科大学(愛知県豊明市)と藤田医科大学岡崎医療センター(同岡崎市)間の約30kmをつなぎ、動物モデルを用いた遠隔模擬手術の実証実験を実施 ▶詳細はこちら
- 2021年11月[hinotori]を用いた日本初の仙骨膣固定術を実施
- 2023年4月[hinotori] 藤田医科大学(愛知県豊明市)と東京・赤坂の約300km間で、臓器モデルを用いた遠隔模擬手術の実証実験を実施
- 2023年10月[hinotori] 藤田医科大学(愛知県豊明市)とシンガホール国立大学の約3000kmで動物モデルを用いた幽門側胃切除・リンパ節郭清・残胃十二指腸吻合の遠隔手術実証実験を実施。国境を越えての遠隔手術は国内初
「hinotori™ Surgical Robot System」とは?


株式会社メディカロイドは、2013 年川崎重工業株式会社とシスメックス株式会社が共同出資し設立されました。 2015年より国産手術ロボットの開発を開始し、2020年12月に「hinotori」を販売開始しました。
「hinotori」の名称は、医師でもあった漫画家・手塚治虫氏の代表作「火の鳥」にちなんで つけられました。「人に仕え、人を支える」ロボットというコンセプトのもと、「hinotori」ロゴにも「火の鳥」がデザインされています。


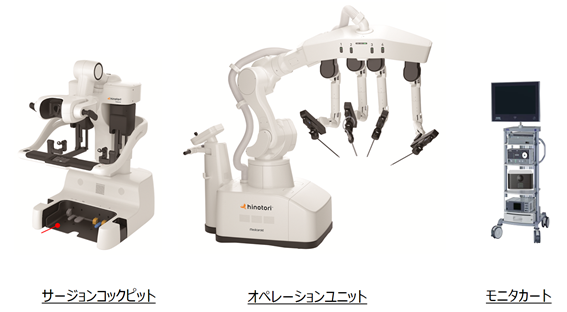
「hinotori」は、オペレーションユニット、サージョンコックピット、ビジョンユニットの3ユニットで構成されています。手術を実施するオペレーションユニットのアームは、ヒトの腕に近いコンパクトな設計で、アーム同士やアームと助手の医師との干渉を低減し、より円滑な手術が可能となることが期待されます。サージョンコックピットは、執刀医の姿勢にあわせることが可能なように人間工学的な手法で設計されています。執刀医の負担を軽減し、ストレスフリーな手術をサポートします。ビジョンユニットは、サージョンコックピットに高精細な内視鏡画像を3Dで映し出すとともに、執刀医と助手の医師との円滑なコミュニケーションをサポートできる設計となっています。

全国に先駆けて手術支援ロボット「da Vinci S Surgical System」を導入した藤田医科大学病院は、ロボット支援手術において国内トップクラスの実績を誇ります。「hinotori」の実用化に向けての研究開発にも取り組み、2021年1月には「hinotori」のトレーニングおよび遠隔手術等の研究・実証実験を行うメディカロイド社との共同研究施設「メディカロイド インテリジェンス ラボラトリー 名古屋(略称:MIL-Nagoya)」を学内に開設しました。藤田医科大学の「hinotori」所有台数は2021年10月現在、MIL-Nagoya1台、藤田医科大学病院1台、藤田医科大学岡崎医療センター1台です。
Hugo™RASシステム 手術支援ロボット
製品概要
 左よりシステムタワー、アームカート及びサージョンコンソール
左よりシステムタワー、アームカート及びサージョンコンソール
 図1 Hugo™RASシステム構成品
図1 Hugo™RASシステム構成品
アームカートは、キャスター付きの移動可能なプラットフォームとなっており、術式に応じて、使用するアームカートの数を決めることができます。また、術者の意図するポート配置及びアームセッティングができるように、アームの高さの調整や(図2a,b)、アプローチ角度の設定をすることも可能です。(図2-c,d,e,f)
 図2 アームカートの可動(a,b:アームの高さ、c,d,e,f:可動域)
図2 アームカートの可動(a,b:アームの高さ、c,d,e,f:可動域)
手術適応領域
ロボット支援手術を研究する日本初の講座
 先端ロボット・内視鏡手術学講座 宇山 一朗 教授
先端ロボット・内視鏡手術学講座 宇山 一朗 教授
本学は2021年4月1日より、国内初のロボット支援手術を含めた内視鏡手術全般を研究する日本初の「先端ロボット・内視鏡手術学講座」を大学院医学研究科 (博士課程) に設置しました。本講座では、日本のロボット支援手術の第一人者である宇山一朗教授の主導の下、 診療科の垣根を越えて各臓器領域のスペシャリストが参画し、これまで診療科ごとに蓄積されてきた技術を共有。遠隔手術・指導の実現や術式の開発・改良、教育システムの構築などに取り組み、技術革新に貢献することをめざします。
日本で初めて導入された手術支援ロボット「ROSA」を使用した人工膝関節置換術が800件を突破
「ROSA システム」は、インプラントの正確な設置を計画する術者を支援します。その特徴は3つあり、第1に適切な骨切り位置にロボットアームが誘導され、正確な位置を決定します。第2にプランニング通りになっているか誤差を数値で確認できます。第3にロボットアームによりインプラントの位置などの微調整が可能です。術者は、データをもとに通常手技に近い感覚で手術が可能で、熟練度に関わらず良好な手術成績が期待できます。人工股関節置換術にも適応可能で、藤田医科大学病院では「ROSA」を重要なロボティックサージェリーの一つとして位置づけています。
-
 ROSA Knee システム
ROSA Knee システム
-
 骨切り角度をROSAがナビゲーション
骨切り角度をROSAがナビゲーション